Specific devices
MindDev Sim supports a variety of specific equipment, peripherals and software.
Motek Grail
The Grail by Motek treadmill is supported by MindDev Sim. It is possible to dynamically control the different variables of the treadmill:
- Speed of each belt
- Sway
- Pitch
The information from the belt can be sent back to MindDev Sim in order to interpret the data and produce an effect on the projected image.
Principle of operation
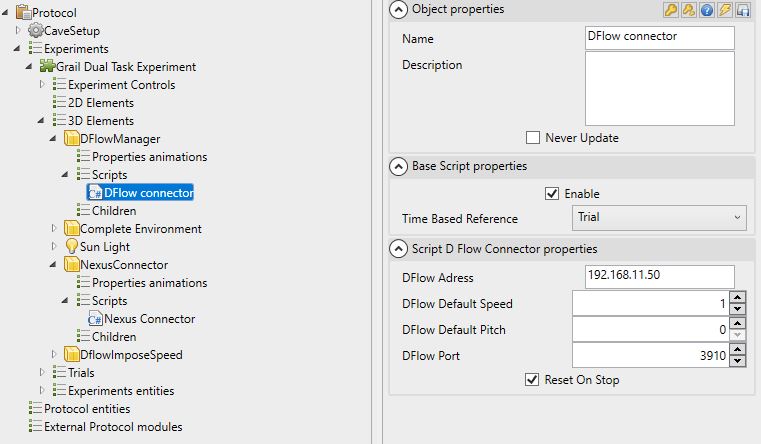
The principle of operation is as follows: it is necessary to have a DFlow connector communication node that will establish a network link with the Network node of DFLOW. This link will remain open for the life of the script. Later, it is possible to reference this communication node anywhere in the protocol tree structure. This makes it possible to control the state of more than one object at a time via the Move Object by grail speed scripts.
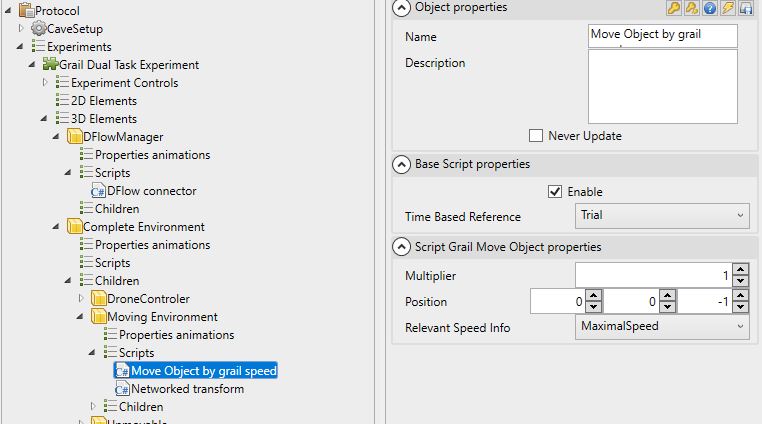
Moving and speed of the belts
Since the belts can have different speeds, MindDev Sim provides an option to choose the formula for applying the speed with respect to the two speeds.
It is then possible to control the belt parameters, including the speed of the belts via the Grail Constant Speed behavior script.
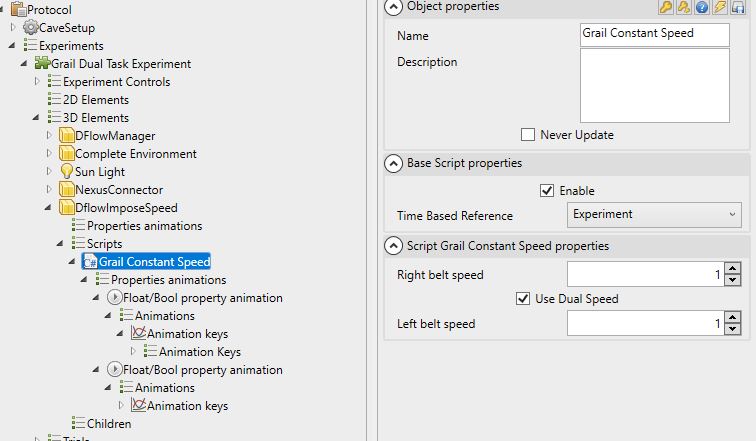
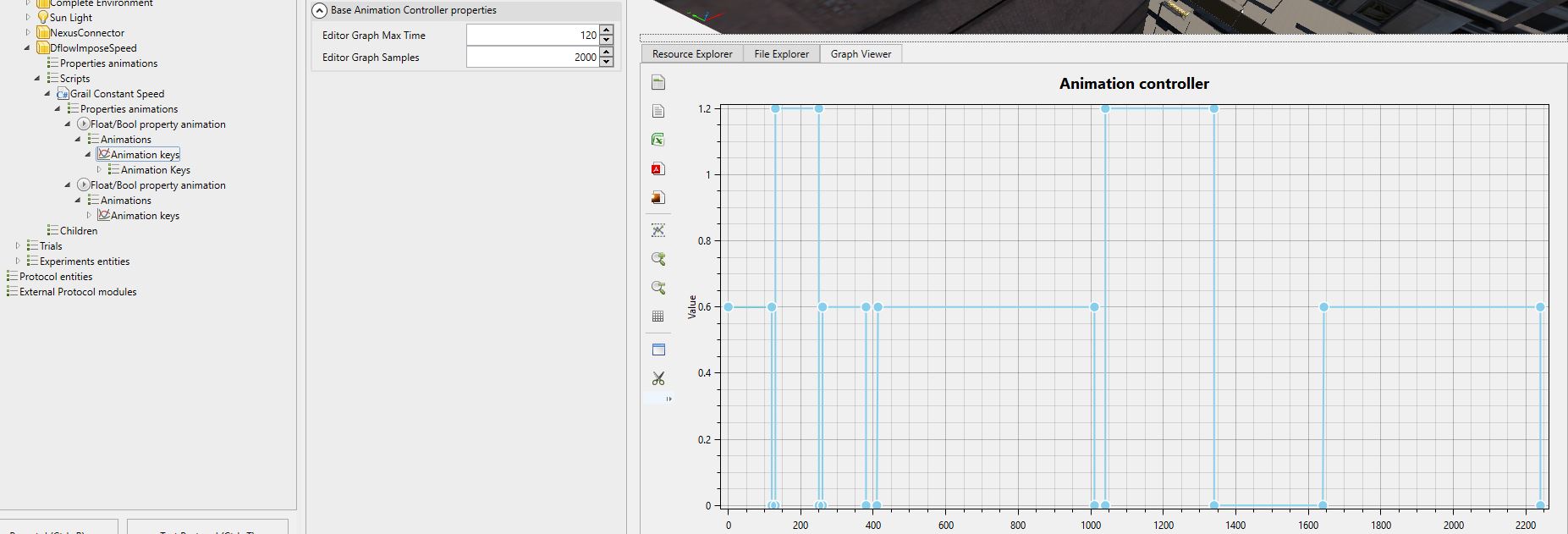
Parameter control via property animations
The scripts for controlling the parameters of the belt have property animations. So it is possible to vary parameters over time via animation functions or key animations!
Network node of DFLOW
The Network node is not available by default, you need to change the DFLOW configuration to see it appear. Also, this node needs to be enabled to allow network communication.
DFlow Project
Here is an example of DFLOW project allowing interconnection with MindDev Sim
Vicon Nexus
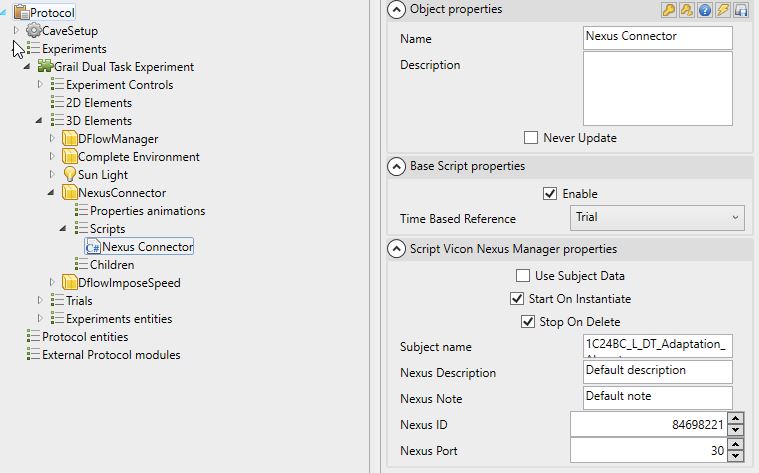
The Vicon Nexus software can have its recording triggered and stopped by a network command sent by MindDev Sim. It is possible to send the whole readable information by Nexus
The packet generated by MindDev Sim is comparable to the one provided in the Nexus documentation.
<?xml version="1.0" encoding="UTF-8" standalone="no"?>
<CaptureStart>
<Name VALUE="dance"/>
<Notes VALUE="The pets ants crime deer jump. "/>
<The crowd pencil pets alert fold deer. With welcome practice representative complete great? Or jolly tiny memorise thread. However wool insect pipe!"/>
<D:/Jeremy/Susan/Captures/Take"/>
<Delay VALUE="33"/>
<PacketID VALUE="33360"/>
</CaptureStart>
Trigger
Triggering recording is only possible when the Nexus Software is configured to receive recording commands via the network.
Auto Stop
It is possible to leave the Nexus recording running when the control script is stopped (Via the "Stop On Delete" option), however, by default, the option is enabled and MindDev Sim will send a stop recording command when the script is stopped.
Sony Visca Protocol
MindDev Sim supports the Sony Visca protocol. This video camera control protocol allows you to manage the hardware (Turn on, turn off) and orientation settings of compatible cameras. Concerning the switching on, the homing and the stopping, it is necessary to inform different parameters relative to each of the cameras:
- The name displayed on the camera
- Its IPV4 address
The Xml formalism allowing the registration of a camera in the MindDev toolbar is the following:
<PTZCameraNode Type="HumanVirtualMaze.CaveSystem.PTZCameraNode" Name="CameraArrière" Ip="192.168.11.201" />
The formalism of the complete file, whose name should be PTZCamera.xml and saved in the Config folder of the data folder is as follows:
<PTZCameraNodes Type="HumanVirtualMaze.CaveSystem.PTZCameraNodeList">
<PTZCameraNode Type="HumanVirtualMaze.CaveSystem.PTZCameraNode" Name="CameraArrière" Ip="192.168.11.201" />
<PTZCameraNode Type="HumanVirtualMaze.CaveSystem.PTZCameraNode" Name="CameraEcranFace" Ip="192.168.11.202" />
<PTZCameraNode Type="HumanVirtualMaze.CaveSystem.PTZCameraNode" Name="CameraMobile" Ip="192.168.11.203" />
</PTZCameraNodes>
Camera control and real-time monitoring procedure
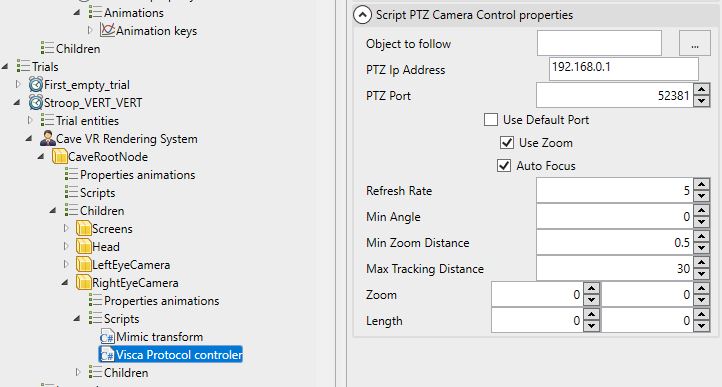
It is possible to automatically control each camera in the immersive space so that it tracks a virtual object in the scene. To do this, first create a new virtual object whose position and orientation matches the position and orientation of the camera in real space. Then, you just have to add a behavior script of type Visca Protocol pursuit. To finish, you just have to choose the object to pursue and set the properties related to the camera such as zoom, AutoFocus.
Tracking a participant
Ideally, a camera can track the participant's head if it is tracked by the VRPN tracking system.
5DT Glove ultra
MindDev supports the 5DT Glove Ultra data glove and allows the recording of data from each of the glove's 14 sensors as well as gesture recognition. To do this, MindDev offers a 14 channel recording node and a gesture recording node, which allows to optimize the received data.
In the same way as for the peripherals on the communication port, MindDev proposes a communication management node with an identifier in the form of an index offering the possibility of using several gloves at the same time.
Raw recording
The channel recording node has an option to choose the type of data to record (raw or calibrated)