Noeud racine
Protocole initial par Antycip
La configuration du système de rendu est complexe, mais une version d'origine, conforme au système de projection vous sera fournie par InMind-VR et Antycip.
Qu'est-ce que le nœud racine
Le système de caméra d'un protocole Cave peut être extrêmement complexe, bien plus que le simple système des protocoles conventionnels ou VR. Pour pouvoir s'adapter à toutes les configurations de projection, MindDev Sim propose un nœud spécifique nativement intégré au système de caméra virtuelle.
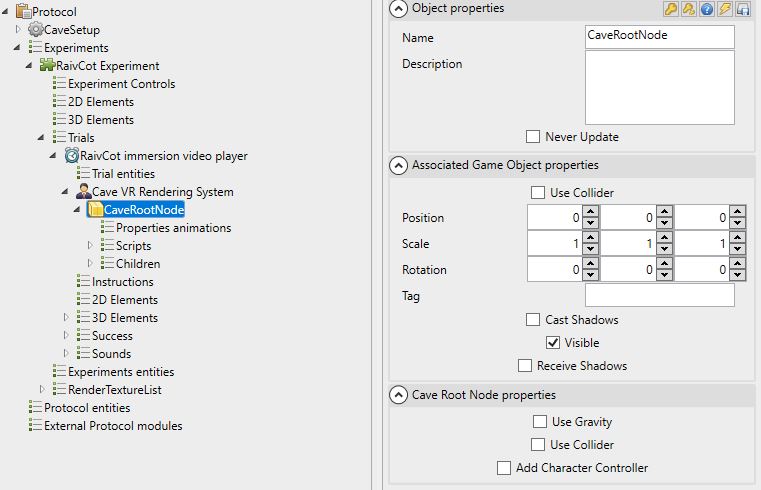
Le nœud racine nommé par défaut "Cave Root Node" est le nœud d'origine de toute la représentation virtuelle du système de projection physique. Ce nœud, intégré dans le système de caméra de tout essai compatible Cave, contient en effet une structure décrivant l'ensemble des écrans physiques, des systèmes de tracking et d'interaction.
Nous avons décrit, dans la configuration, l'ensemble des ordinateurs composant de cluster de rendu, ainsi que les fenêtres de visualisation. Ces fenêtres disposent d'un paramètre de nom de caméra liée. Le CaveRootNode est l'endroit, dans la structure d'essai, qui doit contenir les informations de caméras de rendu.
Référentiel du nœud racine.
Nous devons décrire virtuellement la configuration physique du système de projection, il convient donc de définir un système de coordonnées permettant cette description virtuelle. L'origine de ce référentiel doit être le plus logique possible pour permettre l'expression des coordonnées le plus simple possible. Nous parlons jusqu'à maintenant de système de projection et de calculateurs, nous devons maintenant prendre en compte les écrans, supports de projection d'images.
Position physique et position virtuelle
L'origine de ce référentiel sera équivalente à la position du nœud racine. Lorsqu'un objet physique se rapprochera du centre de référentiel physique, il sera virtuellement très proche du nœud racine dans l'espace virtuel.
La description du système de projection passe donc par l'expression des positions, orientations et tailles de chaque écran composant le système d'affichage. Le choix du référentiel est propre à chaque espace immersif, toutefois, il doit être le plus logique possible et permettre une expression des informations des écrans le plus simplement possible.
Bien souvent, ce référentiel correspondra souvent au référentiel du système de tracking : en choisissant de faire correspondre les deux référentiels, il n'y aura aucune transformation de coordonnées à produire lors de la réception des informations de tracking.
Origine du référentiel
Faites en sorte d'avoir une origine de référentiel simple et remarquable dans votre espace physique. Le plus simple est souvent de le mettre au sol, au centre de l'espace de projection, ainsi, les écrans auront une position en hauteur égale à une demi-hauteur d'écran.
Orientation du référentiel
Faites en sorte d'orienter logiquement votre référentiel par rapport à vos écrans. Dans une salle rectangulaire ou carrée, avec des angles à 90°, les axes doivent être alignés aux axes des écrans, ainsi les écrans auront certaines composantes de position communes les uns avec les autres et les orientations seront de 0°, 90° ou -90°.
Position du nœud racine
Le nœud racine doit rester à la position {0,0,0} et à la rotation {0,0,0}.
Description d'un écran
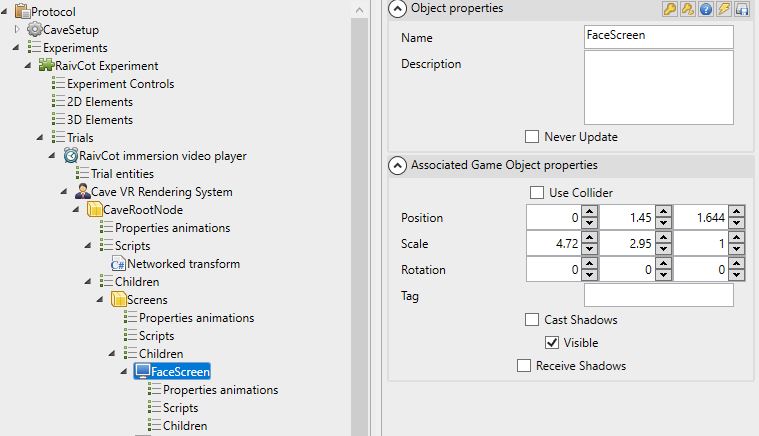
L'entité écran permet de créer un écran virtuel qui correspond à un écran de projection réel. Exprimé dans le référentiel physique, il convient de lui indiquer sa position, sa taille et son orientation. À ce propos, le choix du référentiel d'expression des coordonnées est crucial sur la complexité des valeurs à renseigner.
Unités d'expression
La position et la taille s'expriment en mètres.
Attention à l'orientation
L'orientation d'un écran virtuel doit correspondre à l'orientation de l'écran physique exprimé dans le référentiel choisi.
Description d'une caméra
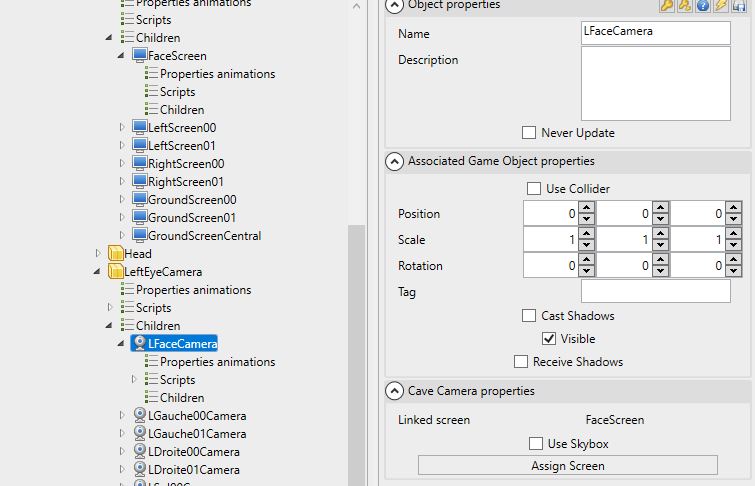
Beaucoup plus simple, une caméra virtuelle représente un point de vue dans l'espace. Une caméra virtuelle est liée à un écran. Pour chaque écran, il y a au moins une caméra et en cas de stéréoscopie, il faudra deux caméras, une pour chaque œil.
Lien caméra-écran
Le panneau de propriété d'une caméra permet de sélectionner l'écran auquel elle est liée.
Orientation d'une caméra
De manière très simple, l'orientation de la caméra doit correspondre à l'orientation de l'écran auquel elle est liée.
Point de vue ?
Une caméra représente un point de vue. En la liant à un écran, MindDev est capable de calculer l'image à projeter correspondante à la position de la caméra dans l'espace par rapport à cet écran.
Point de vue du participant ?
L'utilité d'une salle de projection réside dans la possibilité de faire correspondre les images à afficher au regard du participant réel. Les caméras virtuelles ont naturellement vocation à recevoir des informations de positions et d'orientation de la tête du participant pour calculer le bon point de vue à chaque instant !
Système de vision nocturne
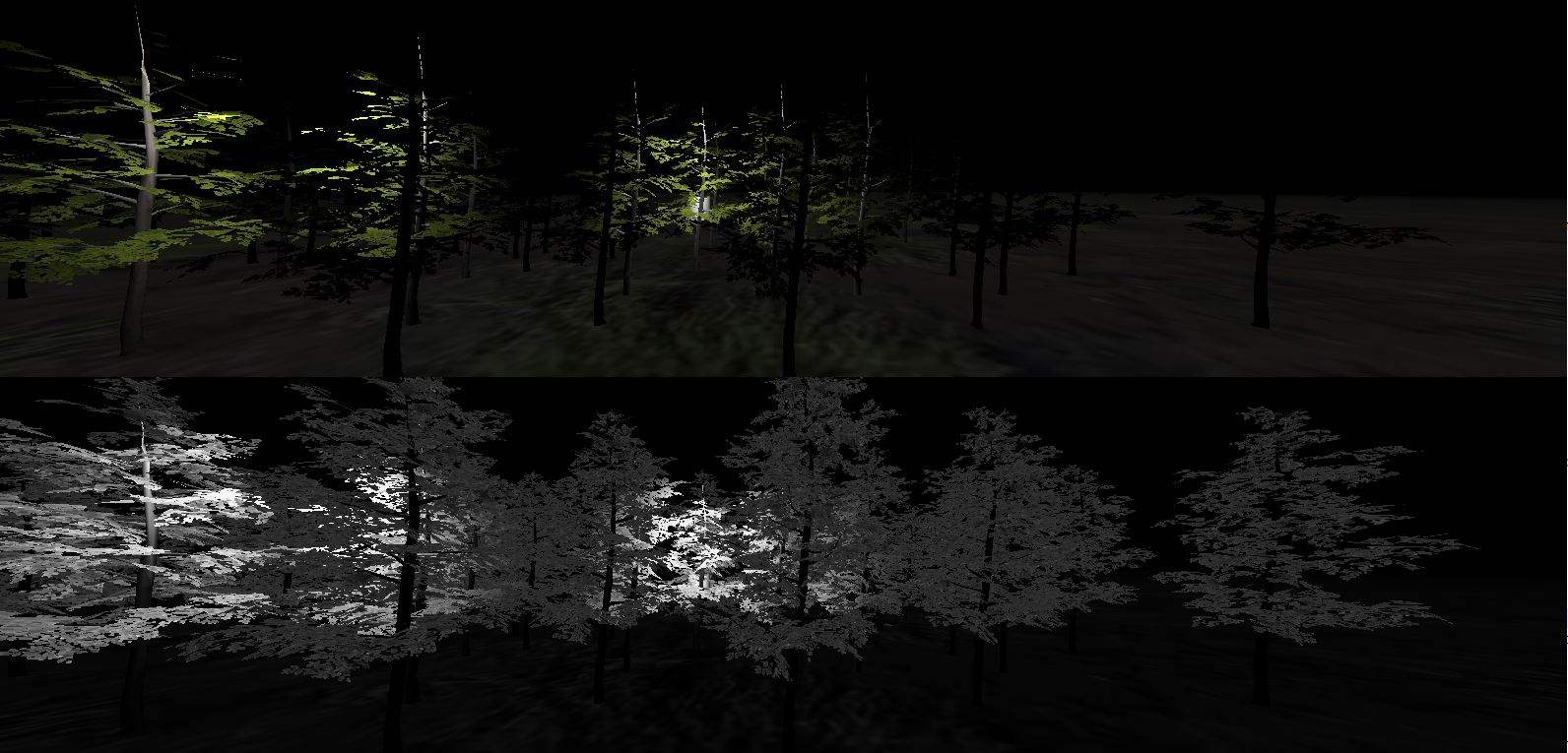 MindDev propose un système de vision nocturne sous forme d'un comportement (script) de caméra. Ce système propose un rendu noir et blanc et gère l'emmission de lumière via les propriétés d'emmissivité de chaque matériau de la scène. Cet effet de caméra n'est pas visible lors de l'édition du protocole.
MindDev propose un système de vision nocturne sous forme d'un comportement (script) de caméra. Ce système propose un rendu noir et blanc et gère l'emmission de lumière via les propriétés d'emmissivité de chaque matériau de la scène. Cet effet de caméra n'est pas visible lors de l'édition du protocole.
Système d'interaction et de pointage, tracking
MindDev Sim repose sur le protocole VRPN pour le tracking d'objets réels (tête, main etc.) et l'interaction avec le monde virtuel via des périphériques de type ART Flystick ou Vicon Apex. Une section documentaire est disponible ici.